OptiTrack Motive
Esta característica solo está disponible en Warudo Pro.
Seguimiento corporal a través de OptiTrack Motive. Requiere acceso a un sistema de seguimiento óptico OptiTrack.
Además del seguimiento de personaje, también se soporta el seguimiento de props. Por ejemplo, puedes querer rastrear una silla o una cámara de mano usando tu sistema de seguimiento óptico y transmitir los datos de movimiento a Warudo, animando un prop de silla o cámara en Warudo acordemente.
Configuración
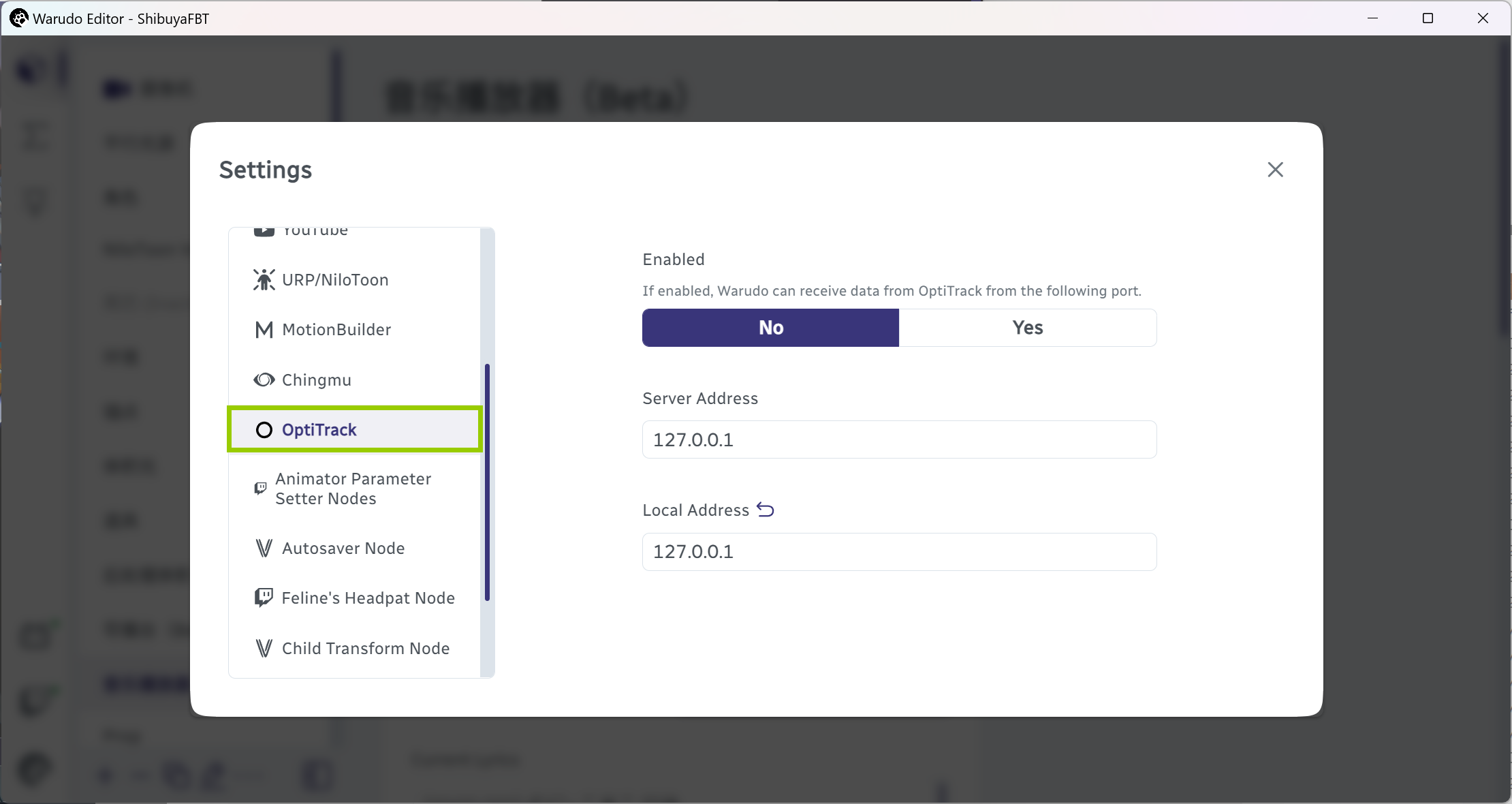
En Warudo, ve a Menu -> Settings -> OptiTrack. Asegúrate de que la Server Address y Local Address sean ambas correctas. La Server Address debería ser la IP de la PC OptiTrack, y la Local Address debería ser la IP de la PC Warudo. Si ejecutas Warudo y OptiTrack Motive ambos en la misma computadora, ingresa 127.0.0.1 para ambos. Luego, establece Enabled en Yes. Deberías ver un mensaje de estado que dice "Connected to OptiTrack Motive".
Seguimiento de Personaje
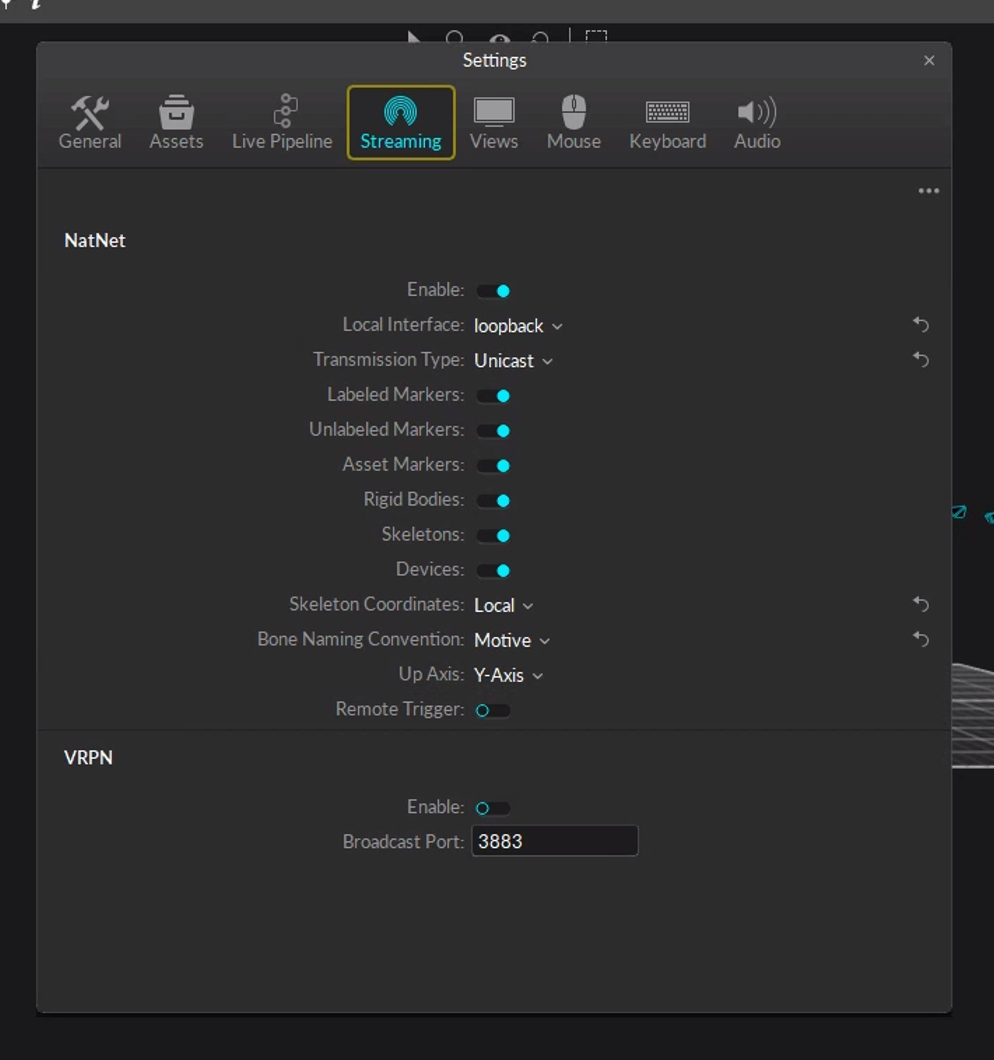
Para conectar OptiTrack Motive a Warudo, por favor habilita Streaming en OptiTrack Motive y establece Transmission Type en Unicast. Por favor también selecciona la IP correcta en el menú desplegable Local Interface. Esta IP debería tener la misma subred que la PC ejecutando Warudo. Si ejecutas Warudo y OptiTrack Motive ambos en la misma computadora, selecciona "loopback".
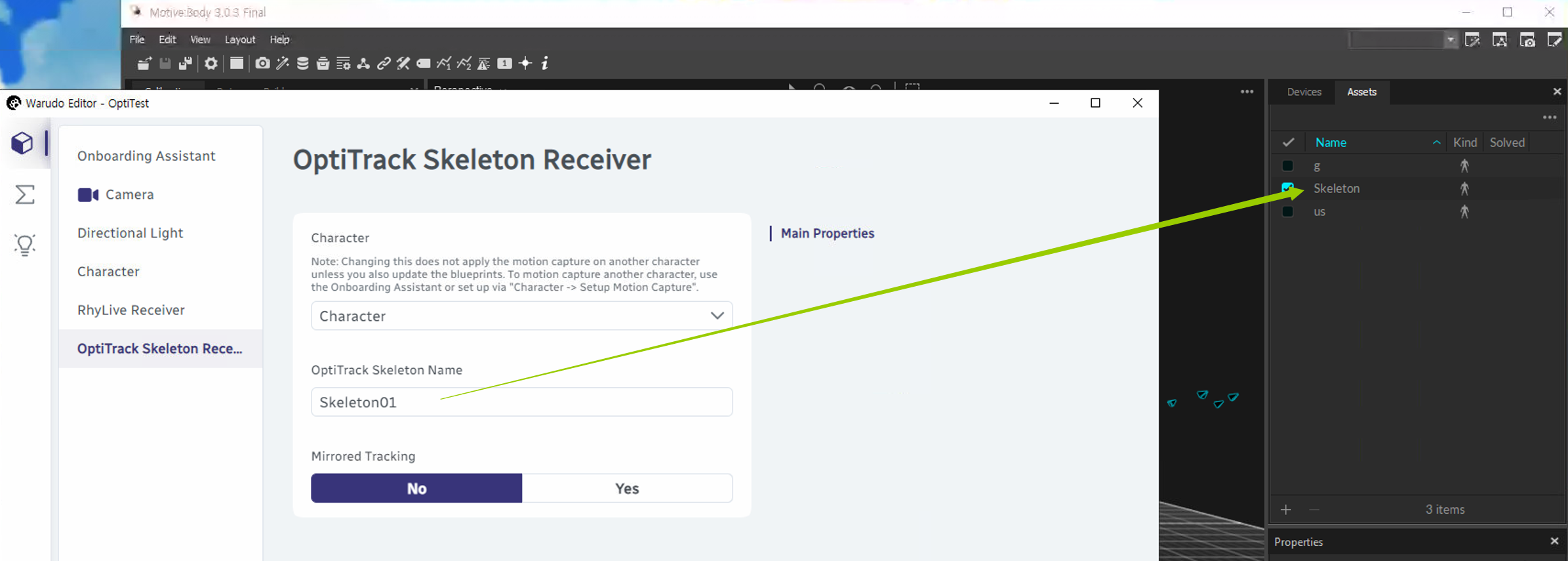
En el asset OptiTrack Skeleton Receiver, asegúrate de que el nombre coincida con el de OptiTrack Motive:
Seguimiento de Props
En Warudo, crea un nuevo asset OptiTrack Rigid Body Receiver y establece OptiTrack Rigid Body ID al ID del rigidbody que te gustaría rastrear. Luego, para Target Asset, selecciona el prop/cámara de Warudo que te gustaría controlar.
Si te gustaría acceder a datos de seguimiento de props en blueprints, puedes usar el nodo Get OptiTrack Rigid Body Receiver Data.
Preguntas Frecuentes
Por favor consulta Resumen y Personalizar Seguimiento de Pose para preguntas comunes.